chapter 12. 형상 감지하기.
형태를 찾아 중심점을 그리고, 형상 타입을 구분하는 코드
중심점 찾기
try
{
//image load 먼저 한 후, dst 에 복사.
dst = src.Clone();
//Conversion to grayscale.
Mat gray = new Mat();
if (src.Channels() == 3)
{
gray = src.CvtColor(ColorConversionCodes.BGR2GRAY);
}
else gray = src.Clone();
//Blurring to reduce high frequency noise to make our contour detection process more accurate.
Mat blurred = new Mat();
blurred = gray.GaussianBlur(new Size(5, 5), 0);
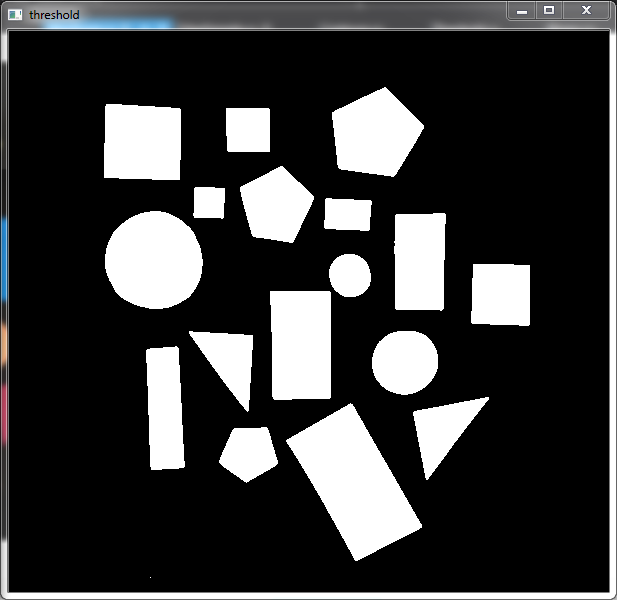
//Binarization of the image.
Mat threshold = new Mat();
threshold = blurred.Threshold(60, 255, ThresholdTypes.Binary);
//find contours
Point[][] contours;
HierarchyIndex[] hierarchyIndexes;
Cv2.FindContours(
image: threshold,
contours: out contours,
hierarchy: out hierarchyIndexes,
mode: RetrievalModes.External,
method: ContourApproximationModes.ApproxSimple);
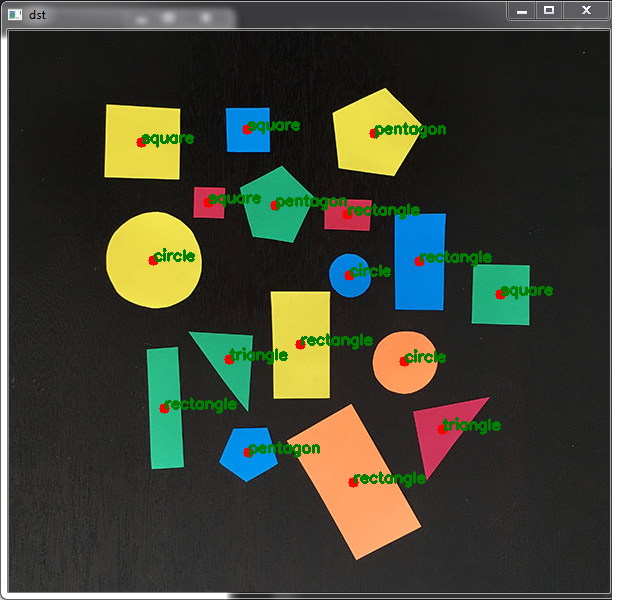
//loop over the contours
foreach (var c in contours)
{
Moments m = Cv2.Moments(c);
Point pnt = new Point(m.M10 / m.M00, m.M01 / m.M00); //center point
Cv2.Circle(dst, pnt, 5, Scalar.Red, -1);
string shape = GetShape(c); //*형상구분
Cv2.PutText(dst, shape, pnt, HersheyFonts.HersheySimplex, 0.5, Scalar.Green, 2);
}
using (new Window("src", WindowMode.AutoSize, src))
using (new Window("threshold", WindowMode.AutoSize, threshold))
using (new Window("dst", WindowMode.AutoSize, dst))
{
//Wait until user finishes (space or esc)
while (true)
{
int c = Cv2.WaitKey(20);
if ((char)c == 27 | (char)c == 32)
{
Cv2.DestroyAllWindows();
break;
}
}
}
}
catch (Exception ex)
{
MessageBox.Show(ex.Message);
}
참조 Threshold 임계값을 적용 후 이미지가 검정색 배경에 흰색 전경색으로 표시되는 것이 가장 좋다.
형상 분석하기
private string GetShape(Point[] c)
{
string shape = "unidentified";
double peri = Cv2.ArcLength(c, true);
Point[] approx = Cv2.ApproxPolyDP(c, 0.04 * peri, true);
if (approx.Length == 3) //if the shape is a triangle, it will have 3 vertices
{
shape = "triangle";
}
else if (approx.Length == 4) //if the shape has 4 vertices, it is either a square or a rectangle
{
Rect rect;
rect = Cv2.BoundingRect(approx);
double ar = rect.Width / (double)rect.Height;
if (ar >= 0.95 && ar <= 1.05) shape = "square";
else shape = "rectangle";
}
else if (approx.Length == 5) //if the shape has 5 vertice, it is a pantagon
{
shape = "pentagon";
}
else //otherwise, shape is a circle
{
shape = "circle";
}
return shape;
}
Leave a comment