chapter 9. 가장자리 검출
가장자리 검출에 대하여 알아보자.
Edge Detection은 이미지 프로세싱에서 가장 기본 작업 중에 하나라고 볼 수 있다. 에지 검출이 잘되기 위해서는 이진화가 잘 되어야 한다. 통상적으로 이진화 과정 까지를 전처리 과정이라고 하는 듯 하다.
OpenCV에서 제공하는 Edge Detection 관련 함수들을 간략하게 알아보자.
Sobel Edge Detection
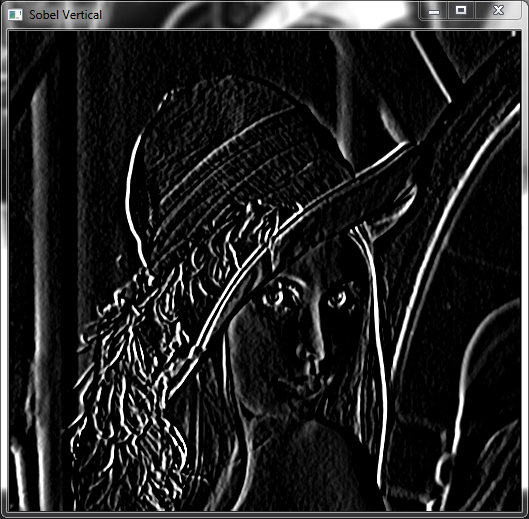
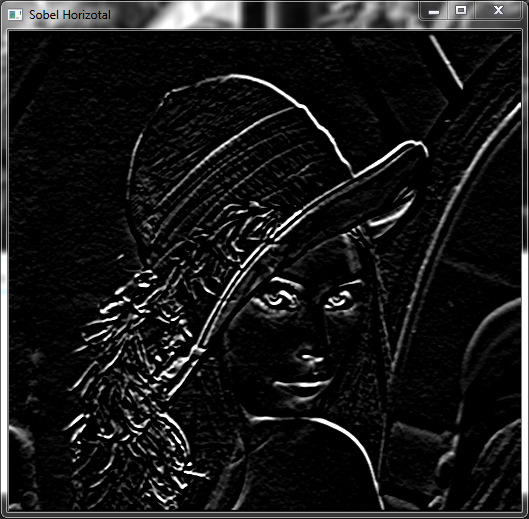
Sobel() 함수는 수직방향 미분값과 수평방향 미분값을 이용하여 가장자리를 검출합니다.
자세한 내용은 Sobel Operator 참조.
OpenCV Sobel() 함수
void cv::Sobel(
InputArray src, //input Mat image
OutputArray dst, //output Mat image
MatType ddepth, //output image depth, see combinations; in the case of 8-bit input images it will result in truncated derivatives.
int xorder, //order of the derivative x.
int yorder, //order of the derivative y.
int ksize = 3, //size of the extended Sobel kernel. It must be 1, 3, 5 or 7.
double scale = 1, //optional scale factor for the computed derivative values, by default, no scaling is applied
double delta = 0, //optional delta value that is added to the results prior to storing them in det.
BorderTypes borderType = BorderTypes.Reflect101 //pixel extrapolation method
)
예제
//variables
Mat dst = new Mat();
Mat sobelX = new Mat();
Mat sobelY = new Mat();
//sobel vertical
using (Window srcWindow = new Window("Sobel Vertical", image: src, flags: WindowMode.AutoSize | WindowMode.FreeRatio))
{
Cv2.Sobel(src, sobelX, MatType.CV_8U, 1, 0);
srcWindow.Image = sobelX;
}
//sobel horizontal
using (Window srcWindow = new Window("Sobel Horizotal", image: src, flags: WindowMode.AutoSize | WindowMode.FreeRatio))
{
Cv2.Sobel(src, sobelY, MatType.CV_8U, 0, 1);
srcWindow.Image = sobelY;
}
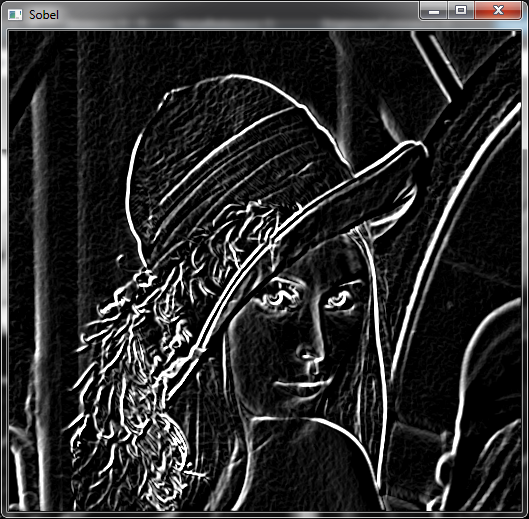
//soble combined
using (Window srcWindow = new Window("Sobel", image: src, flags: WindowMode.AutoSize | WindowMode.FreeRatio))
{
dst = sobelX + sobelY;
srcWindow.Image = dst;
}
//Wait until user finishes (space or esc)
while (true)
{
int c = Cv2.WaitKey(20);
if ((char)c == 27 | (char)c == 32)
{
Cv2.DestroyAllWindows();
break;
}
}
결과화면
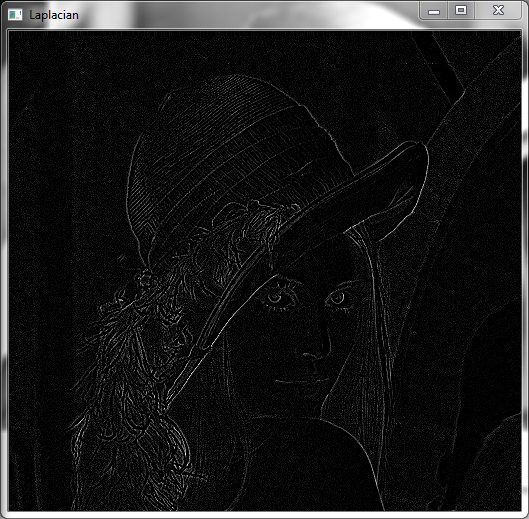
Laplacian Edge Detection
Unlike the Sobel edge detector, the Laplacian edge detector uses only one kernel. It calculates second order derivatives in a single pass.
자세한 내용은 Laplace Operator 참조.
OpenCV Laplacian() 함수
void cv::Laplacian (
InputArray src, //source image
OutputArray dst, //desination image of the same size and the same number of channels as src
int ddepth, //desired depth of the destination image
int ksize = 1, //aperture size used to compute the second-derivative filters.
double scale = 1, //optional scale factor for the computed Laplacian values. By default, no scalling is applied
double delta = 0, //Optional delta value that is added to the results prior to storing them in dst.
int borderType = BORDER_DEFAULT //pixel extrapolation method
)
예제
using (Window srcWindow = new Window("Laplacian", image: src, flags: WindowMode.AutoSize | WindowMode.FreeRatio))
{
Cv2.Laplacian(src, dst, MatType.CV_8U);
srcWindow.Image = dst;
}
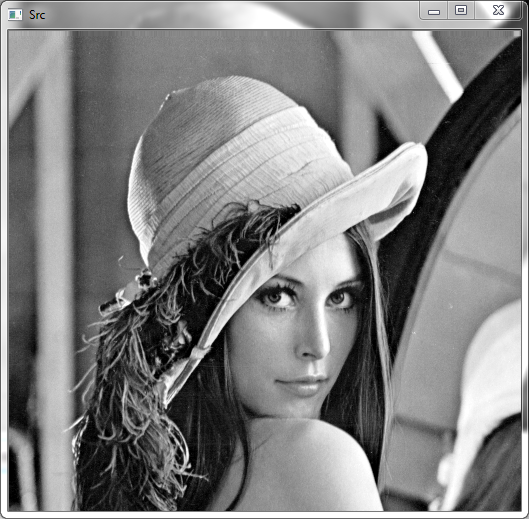
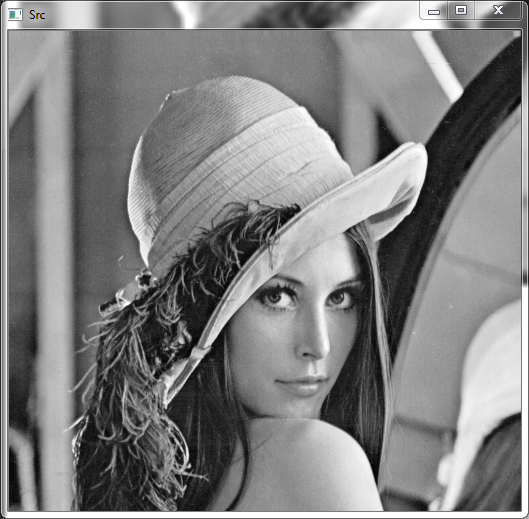
using (Window srcWindow = new Window("Src", image: src, flags: WindowMode.AutoSize | WindowMode.FreeRatio))
{
srcWindow.Image = src;
}
//Wait until user finishes (space or esc)
while (true)
{
int c = Cv2.WaitKey(20);
if ((char)c == 27 | (char)c == 32)
{
Cv2.DestroyAllWindows();
break;
}
}
결과화면
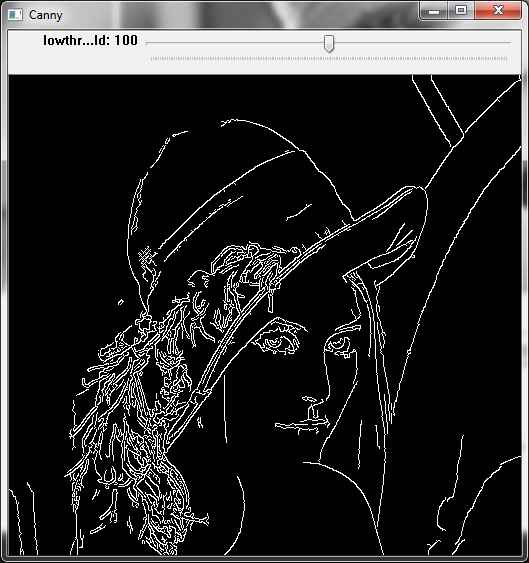
Canny Edge Detection
Canny Edge Detector는 다단계 알고리즘을 사용하여 이미지에서 다양한 범위의 가장자리를 감지하는 가장자리 감지 연산자.
자세한 내용은 아래 링크 참조.
OpenCV Canny() 함수
void cv::Canny (
InputArray image, //8-bit input image
OutputArray edges, //output edge map; single channels 8-bit image, which has the same size as image
double threshold1, //fist threshold for the hysteresis procedure
double threshold2, //second threshold for the hysteresis procedure
int apertureSize = 3, //aperture size for the Sobel operator
bool L2gradient = false //a flag,
)
예제
// open source image
using (Window srcWindow = new Window("Src", image: src, flags: WindowMode.AutoSize | WindowMode.FreeRatio))
{
srcWindow.Image = src;
}
// open canny image with trackbar
using (Window srcWindow = new Window("Canny", image: src, flags: WindowMode.AutoSize | WindowMode.FreeRatio))
{
int ratio = 3;
int lowThreshold = 100;
var thresholdTrackbar = srcWindow.CreateTrackbar("threshold", value: lowThreshold, max: 200, callback: (pos) =>
{
Cv2.Canny(src, dst, pos, pos * ratio);
srcWindow.Image = dst;
});
thresholdTrackbar.Callback.DynamicInvoke(lowThreshold);
}
//Wait until user finishes (space or esc)
while (true)
{
int c = Cv2.WaitKey(20);
if ((char)c == 27 | (char)c == 32)
{
Cv2.DestroyAllWindows();
break;
}
}
결과화면
Leave a comment